|
|
Post by paulg100 on Aug 15, 2016 13:02:46 GMT
"As far as what I want to reach, really just whatever is best for Oculus Rift VR."
you already have your gearboxes and motors so i would think the best thing you can do is keep the rig as small and light as possible so you reduce the torque requirements and can get more speed.
also if i was designing mine again id look at dropping the COG which will also help.
|
|
|
|
Post by Trip Rodriguez on Aug 15, 2016 13:28:01 GMT
Thanks paulg100 I appreciate the info. I guess I'm going to go with the same dimensions as everyone else. I was hoping to make sense of the numbers here and try to play with mechanical advantage but I'm just banging my head against the wall. I still think there has got to be a way to sacrifice some mechanical travel to gain some mechanical advantage for more torque but it's been over 20 years since I took geometry in high school and apparently remember none of it. Hours of working online hasn't got me the solution I was looking for, so unless a math wizard pops up in the next hour or two I'm proceeding according to plan "A". |
|
|
|
Post by GA-Dawg on Aug 15, 2016 15:07:27 GMT
I will update on my build thread but I got about 4.5 hours for driving in this weekend (pCars and Drit Rally). I got what I believe to be the best "feel" and I am going to go back and redesign the upper platform. So if I where you I would REALLY think about COG BEFORE you start.
|
|
|
|
Post by Trip Rodriguez on Aug 15, 2016 17:08:48 GMT
@ga-Dawg and others, that actually is a perfect lead in for my next question! Thanks for the heads up GA-Dawg, the one up side of my having let this project sit so long neglected is getting info from others who have used it with Rift before I start. I'm definitely going to make the platform as light as I can (not even going to attach a monitor). As far as CG beyond just that, once the weight is as low as I can get it the only thing left to do is a counterweight which would definitely have drawbacks as well. I'm hoping to add a G-seat next so that will add weight too but at least it will be in the center of the platform. What do you have in mind for your changes @ga-dawg ?
My question, just out of curiosity: I notice that everyone has the motion platform in the opposite orientation I would put it in if I didn't have examples to go by.
As far as I know we want the rider to be centered on the upper platform (and as low as possible). The forward "floor" and pedals etc. are hanging out in front. It would seem to me that performance would be better if there was just one upper platform attachment point set directly behind the rider and the other two up front to better share the load of the extra weight of floor/pedals/screens/etc. Is anyone here able to explain to me why this isn't the way to go?
|
|
|
|
Post by Trip Rodriguez on Aug 15, 2016 17:22:14 GMT
After much consideration and feeble attempts at recovering my lost knowledge from high school geometry (which is the one math course I did exceptionally well in, but that was 20 years ago!) and GA-Dawg's last reply here stating he is redesigning his upper platform I'm going to build my platform (initially at least) with some dimensional adjustments to optimize for the 130mm torque arm setting. It will be a simple matter to adjust the motors out later to optimize for the 160 mm setting, or even to go to the 100 mm setting, if I see fit. 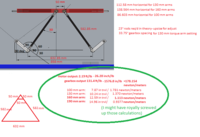 |
|
|
|
Post by paulg100 on Aug 15, 2016 18:06:59 GMT
yes you can have the platform the other way around. you just switch the axis in the software.
|
|
|
|
Post by GA-Dawg on Aug 15, 2016 19:10:21 GMT
I am going to redesign my setup to be like this.  The attachment points my be a little high on this rig but this is what I am thinking. My understanding you want the attachment points close to the middle of the stomach. |
|
|
|
Post by Trip Rodriguez on Aug 15, 2016 20:10:46 GMT
paulg100 Thanks Paul, but I'm still thinking if my way was better it's the way everyone else would be building them! Fortunately it wouldn't be too big a deal to rotate it 180 if it doesn't work out so maybe I'll give it a try. @ga-Dawg yes having the rider below the attachment points is ideal but I imagine there is a reason folks are building Stewart rigs like ours instead of that type rig. I think it might be a matter of travel. Off the top of my head I think rotations would be the same but you'd get far less translation from the same actuators? Also for similar performance I think that type takes up a lot more space. That rig you have the pic of varies from ours a lot though, this might be more what you are looking for: www.youtube.com/watch?v=4EVRRboGmO8 However note the linear actuators on that one as well.
|
|
|
|
Post by tronicgr on Aug 15, 2016 20:26:21 GMT
It's true, that simtools (xsimulator) software does not have adjustable COG, it's fixed. So it makes sense to make the cockpit mount lower to be inside the rotation of the COG. But the beauty of 6DOF platform lays on the fact that with proper motion software that does inverse kinematics calculations, you can define the 6dof platform dimensions and thus include adjustable COG level, even if your cockpit sits well above the platform or way lower (inverted hanging 6dof). So dealing with it in hardware, by adjusting your platform to the incomplete motion software (simtools) is not really the solution. You are better off using the UDP output of simtools with the universal UDP input of Ian's BFF motion software...  This way you have the many games support of simtools along the precise math calculations of BFF motion software. Thanks Thanos |
|
|
|
Post by GA-Dawg on Aug 15, 2016 22:22:42 GMT
I was using BFF at first but it didn't feel right. I decided to follow Paul and give no limits 2 a try which doesn't have UDP. It's a shame that they (sim/game makers) can't all get on the same page. Once I got that working the way I wanted I went back to dirt and pCars and stayed with xsimulator. Using xsimulator I can say I learned a number of thing and I think I can tune BFF much better now. That would just leave me with the accl ramp problem.
Trip....sorry not trying to hijack your thread hope you don't mind the off topic posts.
|
|
|
|
Post by Trip Rodriguez on Aug 16, 2016 8:17:27 GMT
No worries @ga-Dawg ! I hogged plenty of space in your thread while waiting for this one to get active and besides, most of this is useful discussion for improving motion builds for VR which is my thing. Did anyone review my dimensions (The last set posted here LOL)? I'm still wondering if anyone knows why all the Stewart rigs I see here and other places have the point of the upper platform at the front, where it seems to me to make more sense to have two actuators up front to help split the load of the extra weight hanging out front (pedals, monitors, floor, etc.). I figure there has to be a reason, but I'm hoping it's as simple as it giving easier access to climb on and off or something else like that I can ignore =). tronicgr have you had any experience with G-seat builds? I want to add one to my motion sim ASAP after it's running =D. I'm considering attempting a wiper build as cost will be a major issue. |
|
|
|
Post by GA-Dawg on Aug 16, 2016 19:37:10 GMT
I can say that I had just copied what others had done before me. I really didn't have enough expertise to question the design and I wanted to make sure it work when I was done. But now that I have had my system up and running for awhile I can see no reason that it couldn't be flipped. As a matter of fact if I do decide to build a new upper platform (which I am seriously think about) it would have to be constructed that way.
|
|
|
|
Post by Trip Rodriguez on Aug 16, 2016 20:14:22 GMT
@ga-Dawg Thanks, I'm going to try it. The worst that can happen is I have to disassemble it, turn it around, and reassemble.. An hour or two of simple work.
|
|
|
|
Post by vicpopo on Aug 17, 2016 6:22:29 GMT
Hello Triprodriguez,
I linked the video I made with the new 6dof plugin for xsim reworked by heXpod.The parameters in the plugin match to the reality plateform dimension.You maybe could consider to test with that plugin.
For the motor positions I think that the question isn't were the motors are because heXpod plugin consider them ( like my motors positions which called 0° and the others 6dof ( stevant ,bilbo etc... 30°).The question is to well balance the center of gravity trying to have a good balance for the upper platform weight for each of 6 motors.
Just remember my motors are 0,25 kW gearbox ratio is 100 ( helical gear box no worm )so around 11 rpm at the output shaft.
Crank level 110mm.
We all have quiet the same dimensions , upper plateform from 650 to 750 mm ( diameter where the upper joints are attached) , lower quiet the same ( a little bit higher diameter ) and the high # arm level from 450 to 500 mm.
|
|
|
|
Post by Trip Rodriguez on Aug 26, 2016 1:28:22 GMT
I remembered being told that the pilot/driver should be centered on top of the upper platform, but the sims I look at here look like the driver/pilot is set a bit farther back than that ostensibly to better balance the CG/load.
Have you folks been setting up your "cockpits" on the top platform so the weight (CG) is centered on the platform or compromising by just moving it back a little bit so it's not as front heavy as it would be if the driver/pilot was in the ideal centered location?
Here's a quick time lapse video of my assembly progress so far. =)
Note that those floor panels are steel, about 35+ pounds each, and get bolted to the stands that are glued to the floor. I got to the point where all the gearboxes are bolted down. I will be bracing them at the top as well, somewhat similar to Stevant's build.
Next up is to build a cabinet for the inverters etc. and start with some of the wiring while I wait for hardware to arrive for the actuator rods.
|
|







 This way you have the many games support of simtools along the precise math calculations of BFF motion software.
This way you have the many games support of simtools along the precise math calculations of BFF motion software.
