|
|
Post by hexpod on Jun 12, 2016 14:27:16 GMT
with 180deg sensors, two different scenarios could be taken in consideration
for the extended range option, the starting pos. calibration feature has to be implemented.
@ga-Dawg, can you follow me?

|
|
|
|
Post by GA-Dawg on Jun 13, 2016 13:42:33 GMT
hexpod...Yes I follow...Actually, I always that the extended range image was the correct way to setup the arm as I assumed that "start" would be the mid height of the stroke. I am hoping that I will have time to replace the sensor tonight.
|
|
|
|
Post by hexpod on Jun 13, 2016 21:50:00 GMT
(...)I'll be coding a few functions on the firmware(...) Thanks Thanos may I ask what it will be?
cheers
|
|
|
|
Post by hexpod on Jun 13, 2016 22:01:44 GMT
hexpod ...Yes I follow...Actually, I always that the extended range image was the correct way to setup the arm as I assumed that "start" would be the mid height of the stroke. I am hoping that I will have time to replace the sensor tonight. I am curious about the geometry output. what kind of performance you will get by simply offsetting the sensor (without calibration compensation).
Would be cool to have a video test of your whole workspace and the combined pitch/roll ability.
My plan would be to put the sensor offset than apply the same software "heave offset" that compensate it with servo calibration.
Does it make sense to you?
cheers
|
|
|
|
Post by hexpod on Jun 15, 2016 0:11:47 GMT
test the last one with "servo center" calibration from here:
hexpod.xyz/ |
|
|
|
Post by GA-Dawg on Jun 15, 2016 17:09:56 GMT
I've download it. I've put the 180 in and will report back later. Thanks
|
|
|
|
Post by GA-Dawg on Jun 15, 2016 17:28:44 GMT
So this is where I am at.
1. Position sensors are 180 degrees
2. Refined the CAD drawing and I am using more accurate measurements
3. Lever arms are in standard position (parallel to the ground)
4. I kept trying Heave offset until I got one that match my CAD at mid stroke.
Here is the .ini....I will need to modify the servo position range
[6DOF_design]
Base_Ratio=1.000000
Platform_Ratio=1.000000
Platform_Height=58.175999
Servo_Arm_length=16.000000
[6DOF_limiters]
Max_displacement=80.000000
Crossing_Sensitivity=6.000000
Knee_Cap_limit=70
Servo_Rotate_Limit=-126
[6DOF_input_limits]
Yaw_Limit=30
Pitch_Limit=25
Roll_Limit=25
Surge_Limit=25
Sway_Limit=25
Heave_Limit=25
[6DOF_Center_of_Gravity]
X=0.000000
Y=0.000000
Z=0.000000
[Settings]
SW_Simulation=0
Invert_Servo_Values=0
[6DOF_heaveOffset_surgeOffset]
Heave=-7.160000
Surge=0.000000
[Servo_Orientation]
Servo5=-2.094395
Servo6=1.047198
Servo1=0.000000
Servo2=3.140000
Servo3=2.094395
Servo4=5.235988
[Coordinates]
Base_1y=-45.500000
Base_1x=-41.345272
Base_1Z=0.000000
Base_2y=45.500000
Base_2x=-41.345272
Base_2Z=0.000000
Base_3y=58.556056
Base_3x=-18.731519
Base_3Z=0.000000
Base_4y=13.056056
Base_4x=60.076792
Base_4Z=0.000000
Base_5y=-13.056056
Base_5x=60.076792
Base_5Z=0.000000
Base_6y=-58.556056
Base_6x=-18.731519
Base_6Z=0.000000
Platform_1y=-5.080000
Platform_1x=-41.345272
Platform_1Z=0.000000
Platform_2y=5.080000
Platform_2x=-41.345272
Platform_2Z=0.000000
Platform_3y=38.346056
Platform_3x=16.273227
Platform_3Z=0.000000
Platform_4y=33.266056
Platform_4x=25.072045
Platform_4Z=0.000000
Platform_5y=-33.266056
Platform_5x=25.072045
Platform_5Z=0.000000
Platform_6y=-38.346056
Platform_6x=16.273227
Platform_6Z=0.000000
[Servo_Calibration]
Servo_positive_range_16383-32737=14000.000000
Servo_negative_range_25-16383=1014.000000
Servo_center_16383=0.000000
[UseUpperServoLimit]
UseUpperServoLimit=0
[UseInverseCubePosition]
UseInverseCubePosition=0
Cheers,
GA Dawg
|
|
|
|
Post by hexpod on Jun 15, 2016 17:57:31 GMT
something is wrong.
did you deleted the old .ini?
the servo center pos should be at
Servo_center_16383=16383.000000
"Install Instructions:
- In order to install the plugin, simply delete the old 6DOFsetup.ini file and copy and replace the 6DOF.dll file in the X-Sim/Interfaceplugin folder"
also it's unclear why you've reduced the upper range below the center position.
Servo_positive_range_16383-32737=14000.000000
cheers
|
|
|
|
Post by GA-Dawg on Jun 15, 2016 18:30:41 GMT
Sorry...Did not delete the .ini... spent a lot of time getting it right.  Will add the line. EDIT I changed the upper range as a test to see what would happen. |
|
|
|
Post by hexpod on Jun 15, 2016 19:34:48 GMT
Sorry...Did not delete the .ini... spent a lot of time getting it right. Will add the line. EDIT I changed the upper range as a test to see what would happen. I your case I would try to correct the position with "servo center" value only. I would leave the Servo positive/negative range at their default. If for some reason you have to reduce additionally your sensor range, I would recommend to do it proportionally for upper and lower area.
|
|
|
|
Post by hexpod on Jun 16, 2016 14:55:23 GMT
GA-Dawg,
May I ask why you want to use the heave offset -7?
3d representation shows that you could have a better response with -10 or -11
ex.
Try the combined pitch/roll ability with offset -7 and -11. you should notice a difference.
cheers
|
|
|
|
Post by GA-Dawg on Jun 16, 2016 21:49:39 GMT
Quick update. I did test the 3.3 and the 180 degree sensors. Much closer and it might be 100% right but I was getting a conflicting number from the protractor vs "servo position" when I moved the sliders closer to the limits. But that could be the cheap protractor I was using. I got a plan to use my phone which will give a much better reading, just need to setup a web camera to capture the video. Regarding the heave offset. I will say I have made a assumption that you would want to have the machine start at mid stroke to you have the same amount of possible travel in both direction (180 degree sensor will limit that I know) So with the dimension of my machine the the mid stroke angle on the servo levers is 24.16 from the horizon. So to have that angle when the system starts up I figured out (trial and error) that the number needs to be Heave=-7.160000 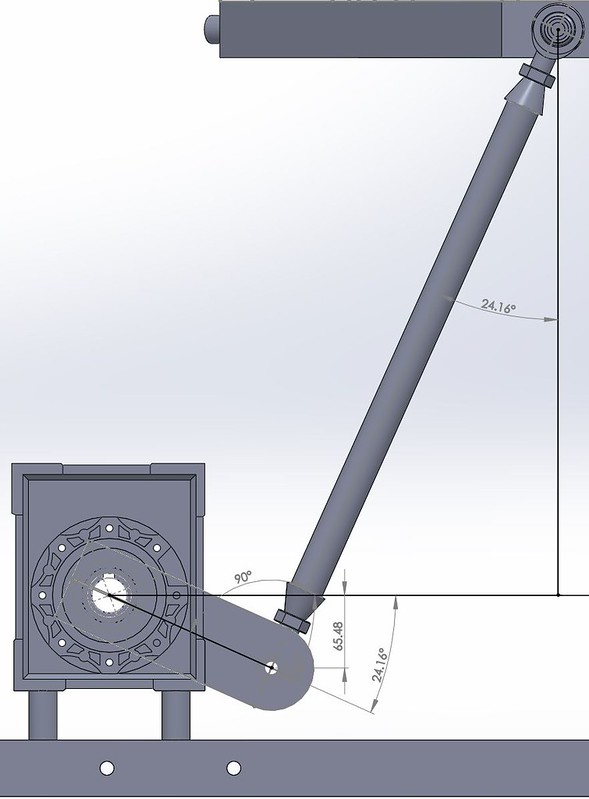 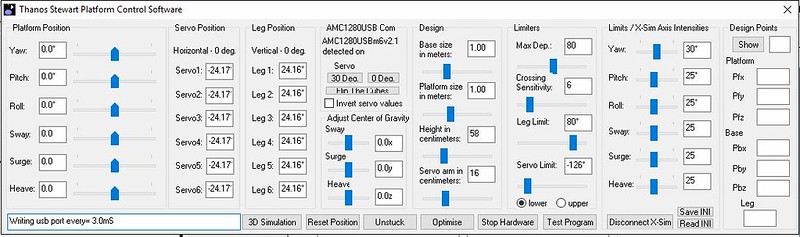 Have I made some wrong assumptions? Also I it's not 100% clear what function the limiters perform. Is there an explanation somewhere? Cheers GA Dawg |
|
|
|
Post by billo2404 on Jun 16, 2016 22:51:45 GMT
ho molto da imparare su questo software e il traduttore non mi aiuta per niente  Secondo la mia teoria l'angolo a 90 gradi non deve essere formato tra l' asta e la leva... Quando ho costruito il mio 6dof avevo detto che non mi sembrava corretto avere le leve parallele al pavimento ma nessuno mi ha ascoltato quindi io ho posizionato il centro per avere stessa corsa superiore e inferiore secondo la mia idea e non ho insistito. Molto probabilmente non sarà facile parlare di argomenti tecnici con il traduttore ma dammi un momento e cerco qualche foto che possa spiegare meglio dove si trova l'errore nel tuo disegno secondo me I have a lot to learn about this software and the translator does not help me at all According to my theory the angle to 90 degrees should not be formed between the 'rod and lever. . . When I built my 6DOF I told you it did not seem correct to have the levers parallel to the floor, but no one listened to me so I positioned the center to have the same top and bottom race in my mind and I did not insist. Most likely it will not be easy to talk about technical issues with the translator but give me a moment and I try some pictures that can explain better where the error is in your design in my opinion |
|
|
|
Post by billo2404 on Jun 16, 2016 22:54:26 GMT
trovata... found. . .  |
|
|
|
Post by GA-Dawg on Jun 16, 2016 23:10:25 GMT
|
|







