|
|
Post by vicpopo on May 19, 2016 10:30:40 GMT
Ok will normaly test your last release tonight ;-)
Agree with you for Max limiter, tried to play with it already but like you was unable to figure out what is functiinality of this paramater !
|
|
|
|
Post by vulbas on May 19, 2016 11:07:35 GMT
ça bosse dur par ici, il va falloir que je test ça  |
|
|
|
Post by vicpopo on May 19, 2016 16:02:40 GMT
Tu peux , tu auras enfin un surge et un sway parfaitement rectilignes en parametrant bien le plugin ;-)
|
|
|
|
Post by GA-Dawg on May 20, 2016 0:06:04 GMT
Hi Hexpod, First let me say thanks for sharing. Really appreciate everyone that takes the time to help out us newbies. This also couldn't have come at a better time for me as I have just started testing my system. Apologize if this sound like a dump question but I am just not following "base in size" and "platform in size". Here is my platform and I just not sure what your calling out and help would be greatly appreciated. 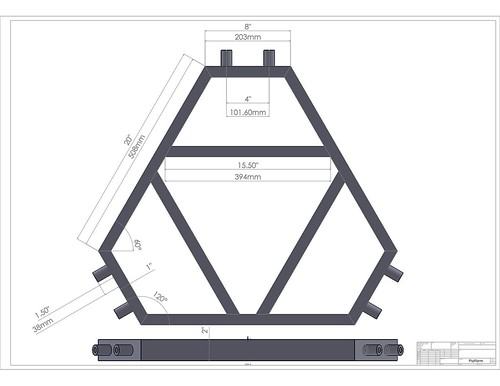 Thanks in advance for your help GA Dawg |
|
|
|
Post by hexpod on May 20, 2016 9:20:18 GMT
Hi Hexapod, First let me say thanks for sharing. Really appreciate everyone that takes the time to help out us newbies. This also couldn't have come at a better time for me as I have just started testing my system. Apologize if this sound like a dump question but I am just not following "base in size" and "platform in size". Here is my platform and I just not sure what your calling out and help would be greatly appreciated. Thanks in advance for your help GA Dawg "base in size" and "platform in size" means, it can be considered as a size, not a ratio. it is a circle diameter while drawn through the joints. is it clear now?
|
|
|
|
Post by GA-Dawg on May 20, 2016 15:18:55 GMT
I thought that was the case but for some reason (to many beers I think) I was having trouble converting to a number that made sense 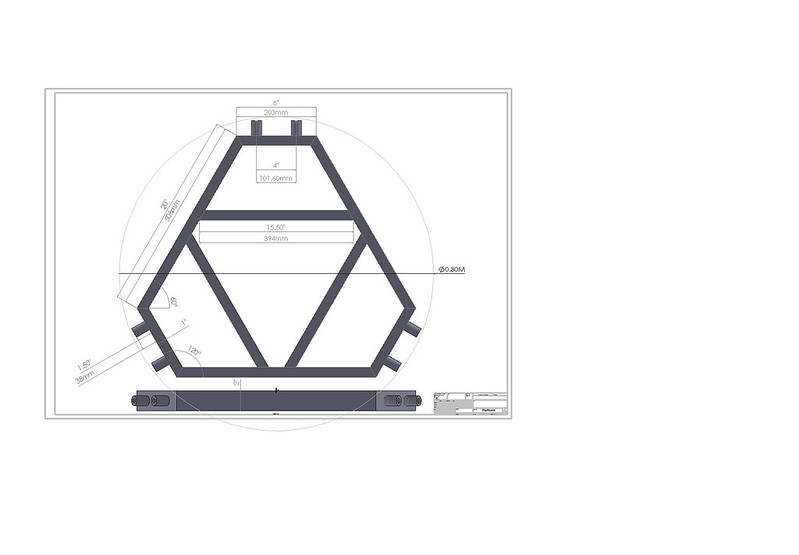 Thanks again. Cheers GA-Dawg |
|
|
|
Post by vicpopo on May 20, 2016 22:12:34 GMT
The "french touch" Plugin V3 ;-) I think I got it. It's really easy to get lost, especially for a code newbie. Please test this: www.dropbox.com/s/0d3444kjo5et0gr/6dof%20heXpod%20MOD%20V3.zip?dl=0from my last messy version: -finally, color code corrected - red motor1, orange motor2. -the order in the servo position/leg position column, should appear correctly now -the servo orientation and coordinates names in the .ini file, should correspond now cheers Hi Hexapod , Tested and works fine. Just a notice for those who would test the release. If you have an old 6dofsetup in your plugin folder just move it when you test the new release 6dof.dll . I was keeping my old 6dof setup and wishing testing your last release mod V3 the optimise button didn't work ( no calculation made ).I deleted the 6dofsetup.ini file and relaunch converter, create a new setup in the plugin ( all values identical to the old one ) and after that , no problem clicking the optimise button . I 've got back my servo starting position calculated after clicking the optimise button. Cheers |
|
|
|
Post by hexpod on May 23, 2016 18:56:13 GMT
For all those who want to get it right, you will find the instructions for the custom spacing in the readmefirst.txt file.
The download package has been updated
Test and report if it works
cheers
|
|
|
|
Post by vicpopo on May 23, 2016 20:28:27 GMT
Ok heXapod will give a try this week Thanks
|
|
|
|
Post by hexpod on May 24, 2016 15:19:31 GMT
Ok heXapod will give a try this week Thanks Instructions for custom spacing for “full scale” platforms:
- Open a CAD project in millimeters.
- Draw the platform and base circles according to your real dimensions and report your attach points with true spacing on those circles. (Fix the center of the circle coordinates at x0/y0)
- Simply divide the platform and base coordinate’s values by a factor x10 and copy them to the .ini file.
(Pay attention, in the .ini file, x is vertical y horizontal)
- Open the plugin GUI and press Read INI and Save INI
- In the GUI, set your base/platform size values at 1.00
For the small scale platforms, up to 20cm, use the same procedure without applying the coordinate’s division factor. Your lever arm length, leg length, platform height, center of gravity and heave/surge offsets will be in millimeters
- If you use the “Instructions for custom spacing” procedure, the platform/base size should be set to 1.00 and has to be considered as a size ratio.

should work
cheers
|
|
|
|
Post by paulg100 on May 24, 2016 20:27:03 GMT
Thanks for all your work on this hexpod, my platforms not quite ready for testing this but will come in handy very soon.
|
|
|
|
Post by GA-Dawg on May 25, 2016 15:38:53 GMT
Thanks again for your work on this. If it's not to much trouble could you tell me if I have it correct. This is the system I am finishing up and I think I have it mapped out correctly. Kind Regards, GA Dawg 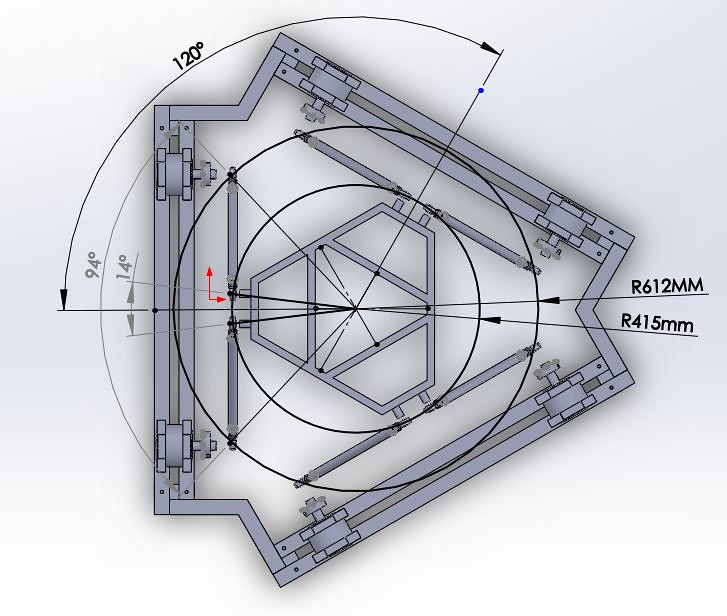 |
|
|
|
Post by hexpod on May 26, 2016 13:58:54 GMT
Thanks again for your work on this. If it's not to much trouble could you tell me if I have it correct. This is the system I am finishing up and I think I have it mapped out correctly. Kind Regards, GA Dawg "try to change each servo orientation by 180 deg.
The values in the .ini file are in radians.
In your case simply swap the orientation values inside each pair. easy
Once you are done with orientations and coordinates, could you please share the content of your .ini file?
cheers
|
|
|
|
Post by GA-Dawg on May 26, 2016 19:10:30 GMT
Hi HeXpod, I did some testing and here is what I can report back. First....Just so we are all on the same page. This is the layout that I used to create the .ini file. 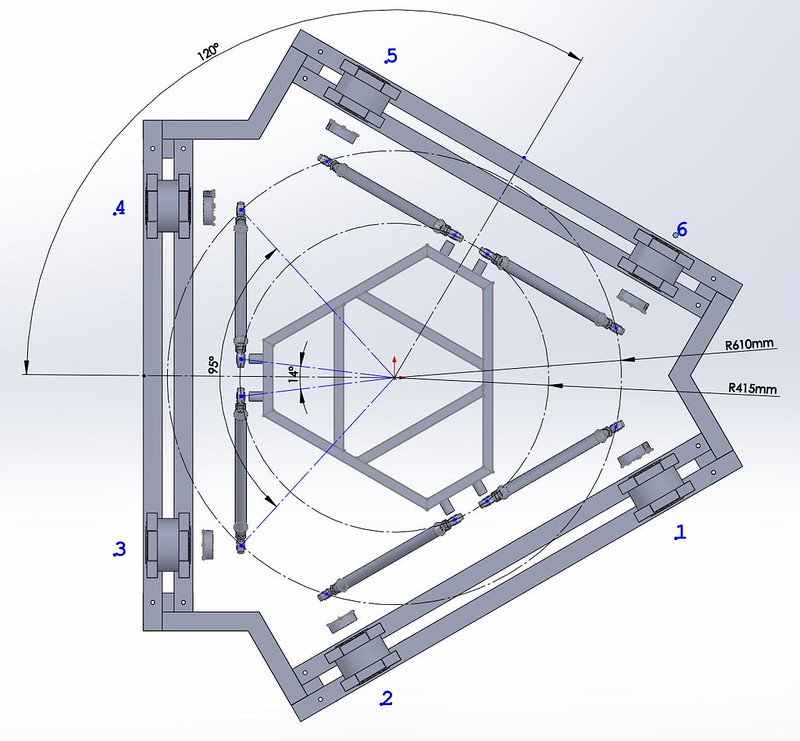 Here is the .ini file [6DOF_design] Base_Ratio=1.000000 Platform_Ratio=1.000000 Platform_Height=150.000000 Servo_Arm_length=16.000000 [6DOF_limiters] Max_displacement=80.000000 Crossing_Sensitivity=6.000000 Knee_Cap_limit=70 Servo_Rotate_Limit=130 [6DOF_input_limits] Yaw_Limit=30 Pitch_Limit=15 Roll_Limit=10 Surge_Limit=25 Sway_Limit=15 Heave_Limit=10 [6DOF_Center_of_Gravity] X=0.000000 Y=0.000000 Z=20.000000 [Settings] SW_Simulation=0 Invert_Servo_Values=0 [6DOF_heaveOffset_surgeOffset] Heave=0.000000 Surge=0.000000 [Servo_Orientation] Servo1=3.650000 Servo2=0.500000 Servo3=1.570000 Servo4=4.700000 Servo5=-0.550000 Servo6=2.600000 [Coordinates] Base_1X=59.500000 Base_1Y=-13.300000 Base_1Z=-150.000000 Base_2X=-18.200000 Base_2Y=-58.100000 Base_2Z=-150.000000 Base_3X=-41.200000 Base_3Y=-45.100000 Base_3Z=-150.000000 Base_4X=-41.200000 Base_4Y=45.100000 Base_4Z=-150.000000 Base_5X=-18.200000 Base_5Y=58.100000 Base_5Z=-150.000000 Base_6X=59.500000 Base_6Y=13.200000 Base_6Z=-150.000000 Platform_1X=25.000000 Platform_1Y=-33.200000 Platform_1Z=0.000000 Platform_2X=16.200000 Platform_2Y=-38.200000 Platform_2Z=0.000000 Platform_3X=-41.200000 Platform_3Y=-5.000000 Platform_3Z=0.000000 Platform_4X=-41.200000 Platform_4Y=5.000000 Platform_4Z=0.000000 Platform_5X=16.200000 Platform_5Y=38.200000 Platform_5Z=0.000000 Platform_6X=25.000000 Platform_6Y=33.200000 Platform_6Z=0.000000 I not sure how to calculate the "[Servo_Orientation]". I got it working (almost) by trial and error. Any help you can provide to me on telling me how to calculate would be greatly appreciated. Right now the motion is "off" if you try the .ini file you will see that the surge is not straight forward. I guess (only a guess at this point) that the "[Servo_Orientation]" is causing a problem with the calculation. One other thing I did notice is the display is in what I would think would be reverse order though the movement is correct on the screen and on the sim.  I would think it would be like this given that's how it is wire to the AMC 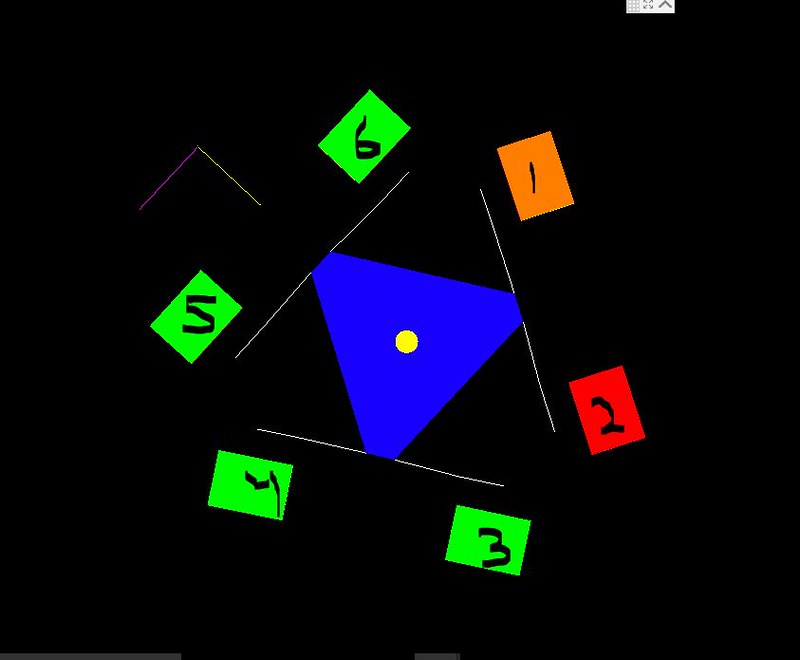 Cheers, GA Dawg |
|
|
|
Post by hexpod on May 26, 2016 21:27:00 GMT
Almost there... 
1.) did you followed this schematic? your motor nr.1 should have both negative coordinates.
2.) I told you to swap the servo orientation NOT the motor placement. you should have the cubes inside then
try again
|
|









