|
|
Post by hexpod on Jun 16, 2016 23:56:53 GMT
We are all making here our "first steps" in a uncharted territory. This kind of pedantic approach is done for the first time in the DiY community. I still don't know if it worth the hassle. :-) Nevertheless I think that those empirical studies can help in a better understanding of a pretty complex and interesting topic. As for every prototype, I would say that the motto should be: Test, test and test again, than report your experience. The 3.3, is the right tool for such a experiences. For the moment I did not found any scientific argumentation that the upper and lower crank lever range HAS to be symmetrical, or that the crank lever HAS to be at 90 deg. with the leg (or the servo axis) while set as a starting position. If there is one I would like to hear it. From what I can judge for the moment, 3d model does not confirm this theory. Please test and report when you will find a setting that give you a better performance. For a better communication please provide your: - sensor offset angle - ini file content - video clip with your motion range with a view on your real platform and 3d model. As always - Be careful - you are testing a prototype |
|
|
|
Post by hexpod on Jun 17, 2016 10:02:58 GMT
According to my theory the angle to 90 degrees should not be formed between the 'rod and lever. . . agree
I would say that this theory is very approximate.
In different designs, the optimized heave will vary around 90. but it also can be 70 or 100.
I don't understand this 90 deg. obsession.
cheers.
|
|
|
|
Post by GA-Dawg on Jun 17, 2016 18:17:51 GMT
billo2404...You are right. The document I shared was incorrect and the 90 should be the way you shared. hexpodThere is a distinct advantage for having the platform start at the mid height of its travel arc, and it comes down to latency. Let me try and explain 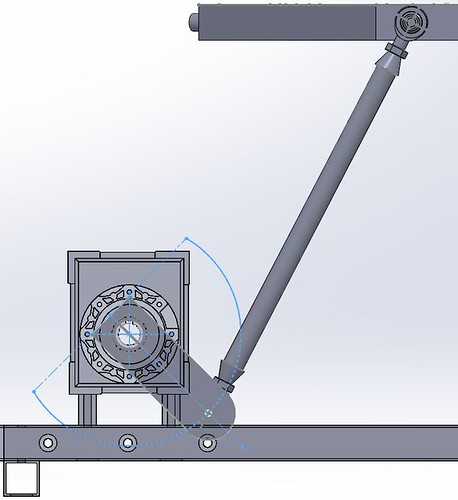 Looking at the arm travel path you can see its not linear like a actuator and as you get closer to the theoretical min and max points, its ability to change the position of platform is extremely poor. I did a quick test and from the mid point to 45 degrees the platform height moved 135 mm from that location and added a another 45 degrees and the platform moved 91 mm. Please let me know if this doesn't make sense. Cheers GA Dawg
|
|
|
|
Post by hexpod on Jun 21, 2016 15:29:17 GMT
another beta 3.4 with a slightly different .ini handling should be less buggy. let's see
hexpod.xyz
all values from .ini are read instantly on program launch
|
|
|
|
Post by GA-Dawg on Jun 22, 2016 15:00:01 GMT
This was a test with 3.3
[6DOF_design]
Base_Ratio=1.000000
Platform_Ratio=1.000000
Platform_Height=58.175999
Servo_Arm_length=16.000000
[6DOF_limiters]
Max_displacement=80.000000
Crossing_Sensitivity=6.000000
Knee_Cap_limit=80
Servo_Rotate_Limit=-126
[6DOF_input_limits]
Yaw_Limit=30
Pitch_Limit=25
Roll_Limit=25
Surge_Limit=25
Sway_Limit=25
Heave_Limit=25
[6DOF_Center_of_Gravity]
X=0.000000
Y=0.000000
Z=0.000000
[Settings]
SW_Simulation=0
Invert_Servo_Values=0
[6DOF_heaveOffset_surgeOffset]
Heave=0.000000
Surge=0.000000
[Servo_Orientation]
Servo5=-2.094395
Servo6=1.047198
Servo1=0.000000
Servo2=3.140000
Servo3=2.094395
Servo4=5.235988
[Coordinates]
Base_1y=-45.500000
Base_1x=-41.345272
Base_1Z=0.000000
Base_2y=45.500000
Base_2x=-41.345272
Base_2Z=0.000000
Base_3y=58.556056
Base_3x=-18.731519
Base_3Z=0.000000
Base_4y=13.056056
Base_4x=60.076792
Base_4Z=0.000000
Base_5y=-13.056056
Base_5x=60.076792
Base_5Z=0.000000
Base_6y=-58.556056
Base_6x=-18.731519
Base_6Z=0.000000
Platform_1y=-5.080000
Platform_1x=-41.345272
Platform_1Z=0.000000
Platform_2y=5.080000
Platform_2x=-41.345272
Platform_2Z=0.000000
Platform_3y=38.346056
Platform_3x=16.273227
Platform_3Z=0.000000
Platform_4y=33.266056
Platform_4x=25.072045
Platform_4Z=0.000000
Platform_5y=-33.266056
Platform_5x=25.072045
Platform_5Z=0.000000
Platform_6y=-38.346056
Platform_6x=16.273227
Platform_6Z=0.000000
[Servo_Calibration]
Servo_positive_range_16383-32737=32737.000000
Servo_negative_range_25-16383=25.000000
Servo_center_16383=16383.000000
[UseUpperServoLimit]
UseUpperServoLimit=0
[UseInverseCubePosition]
UseInverseCubePosition=1
|
|
|
|
Post by hexpod on Jun 22, 2016 16:00:53 GMT
[6DOF_Center_of_Gravity] X=0.000000 Y=0.000000 Z=0.000000 [6DOF_heaveOffset_surgeOffset] Heave=0.000000 Surge=0.000000 [Servo_Calibration] Servo_positive_range_16383-32737=32737.000000 Servo_negative_range_25-16383=25.000000 Servo_center_16383=16383.000000 I presume in this test you've set your sensors horizontally - right?
Hmmm... it should be more accurate.
I can see that more you increase your angel more you are getting offset.
Try to reduce proportionally the positive and negative range and see if you can improve the accuracy.
I would start with those values:
Servo_positive_range_16383-32737=29737.000000
Servo_negative_range_25-16383=3025.000000
reduce more if needed
cheers
|
|
|
|
Post by GA-Dawg on Jun 29, 2016 23:05:21 GMT
Success! With the new settings I am very close. I know I have not convinced you of the need to start a mid stroke so I thought I would give it one last shot. The working envelope for the machine is a sphere 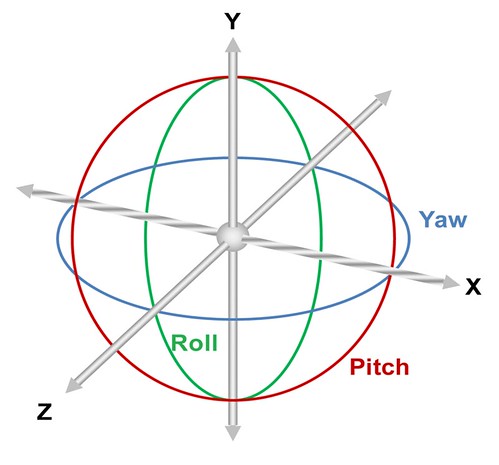 So if you start at any place other then the center (mid stoke) you will limit the amount of motion you can achieve in any direction. Thanks agin for your help and I am going to trying a get things working now with the offset. Cheers GA Dawg |
|
|
|
Post by hexpod on Jul 1, 2016 2:01:11 GMT
"The working envelope for the machine is a sphere"Cheers GA Dawg don't you think that depending of the design the workspace would rather looks close to this:
_
personally I would not call it a sphere, anyway, congrats for the impressive accuracy! I am looking forward to see the performance you can get out of your design. (angular and linear displacements)
cheers
|
|
|
|
Post by GA-Dawg on Jul 1, 2016 15:54:32 GMT
You found a much better illustration and sphere wasn't the right word but still proves my point. Granted I am not a expert but I don't think it matters with regards to the design. On second thought I guess overall size would also play a role. Anyway I've really notice a big difference with surge and yaw/sway with the platform set at mid-stroke vs levers/cranks parallel to the ground. I will do some more testing when I get back from Holiday.
Cheers,
GA Dawg
|
|
|
|
Post by paulg100 on Jul 1, 2016 16:50:36 GMT
Thanks for the work on this guys, watching with much interest.
Have you managed to get surge flat with your new settings GA or does it tilt at the same time?
The DCS profile for simtools is not ideal so I'm hoping to take a look at the DCS plugin for xsim soon.
|
|
|
|
Post by billo2404 on Aug 7, 2016 13:15:50 GMT
guys, I'm always having ver frequently a problem: while playing the sim crashes although xim continues to work. I opened the plugin and tovo or so.  if xsim reboot back into place but after a few minutes back to lock You have any suggestions? |
|
|
|
Post by billo2404 on Aug 23, 2016 9:57:01 GMT
solved. In a particular track in a particular point obviously some pot exceeded the limit set by sending block the plugin. I am working on the limits I solved the problem
|
|
|
|
Post by hexpod on Aug 25, 2016 20:16:07 GMT
solved. In a particular track in a particular point obviously some pot exceeded the limit set by sending block the plugin. I am working on the limits I solved the problem If your arms are overshooting, you can limit the pot range limit in the Fabi's configurator. If your platform is stopping the motion due to the limiters, you can reduce them. The only limiter you can not reduce which can also stop the motion is "out of reach", however by choosing the right heave/surge start offset, you can bring it down.
cheers
|
|
|
|
Post by billo2404 on Sept 13, 2016 22:51:36 GMT
solved. In a particular track in a particular point obviously some pot exceeded the limit set by sending block the plugin. I am working on the limits I solved the problem If your arms are overshooting, you can limit the pot range limit in the Fabi's configurator. If your platform is stopping the motion due to the limiters, you can reduce them. The only limiter you can not reduce which can also stop the motion is "out of reach", however by choosing the right heave/surge start offset, you can bring it down.
cheers
Non ho mai usato il software di Fabi e non vorrei fare danni, secondo te vale la pena fare una prova?
Aumentare i limiti nel plugin 6dof (picth,roll,heavy,surge,sway,yaw) non è sufficente per aggirare il problema?
Very useful information because the problem has re-appeared in another game but with the translator unfortunately I get a bit confused. I never used the software to Fabi and I would not do damage, do you think it is worth a try? Increase the bounds in the plugin 6dof (picth, roll, heavy, surge, sway, yaw) is not enough to get around this? |
|
|
|
Post by billo2404 on Sept 25, 2016 8:13:41 GMT
If your arms are overshooting, you can limit the pot range limit in the Fabi's configurator. If your platform is stopping the motion due to the limiters, you can reduce them. The only limiter you can not reduce which can also stop the motion is "out of reach", however by choosing the right heave/surge start offset, you can bring it down.
cheers
Non ho mai usato il software di Fabi e non vorrei fare danni, secondo te vale la pena fare una prova?
Aumentare i limiti nel plugin 6dof (picth,roll,heavy,surge,sway,yaw) non è sufficente per aggirare il problema?
Very useful information because the problem has re-appeared in another game but with the translator unfortunately I get a bit confused. I never used the software to Fabi and I would not do damage, do you think it is worth a try? Increase the bounds in the plugin 6dof (picth, roll, heavy, surge, sway, yaw) is not enough to get around this? hello hexpod. I'm trying some profiles but the problem starts to become frustrating after about one turn, two at most the plugin crashes. Would you be so kind as to direct me to the fields to increase waxing to solve the problem?  |
|






