|
|
Post by hexpod on Jun 4, 2016 14:40:00 GMT
@ GA-Dawg,
As you see your upper and lower dead zone area are not symmetrical.

Try to find the corresponding calibration values and report if it helps...
|
|
|
|
Post by GA-Dawg on Jun 4, 2016 14:59:14 GMT
Hi All, Well I had a little setback. I was adjusting the ACL and DCL ramps (@paul ACL right now 2.1 DCL .02) and come to find out that one of the 24v wires was lose on the 3 motor. In fact it came detached will I was changing the parameters. Unfortunately everything was powered on at the time and when I plugged it back in I must have shorted one of the chips. So no updates for a few days.  hexpod hexpod....Yes it was BFF @paul...See above Trip RodriguezThe diameter of the whole machine is 6' 4" and is very similar to Stevant. You can put all the electronics under the seat if you want, but I didn't know how much access I would need to them which is why it's detached. 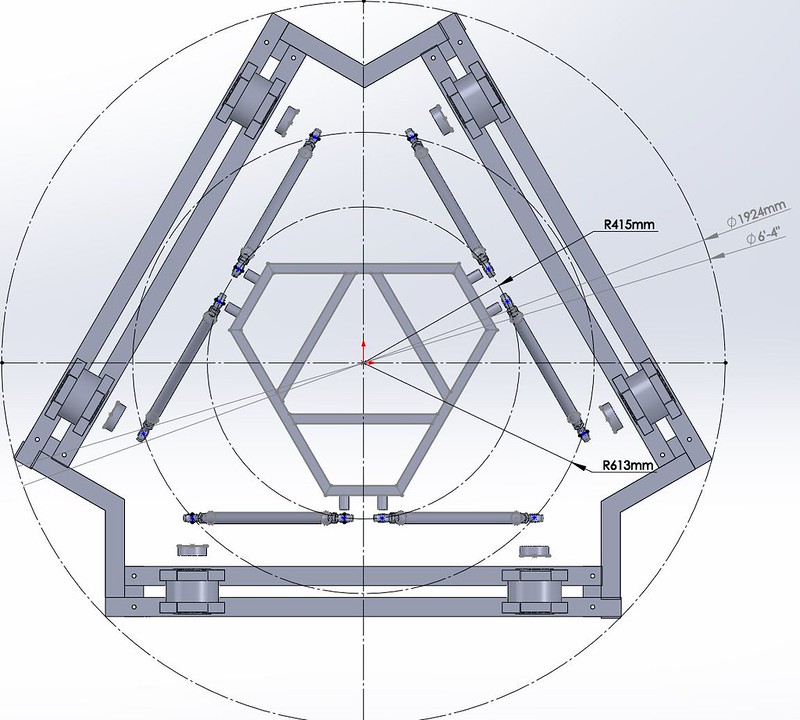 Cheers GA Dawg |
|
|
|
Post by GA-Dawg on Jun 4, 2016 15:23:12 GMT
@ Hexpod So I assume this is going to sound like a stupid question but I didn't see it anywhere and logically this made sense to me as I assumed you would want the same amount of travel in both directions. When setting up the lever (no software just the AMC running) I assumed that you used the pot to make the lever be at the mid-stroke. 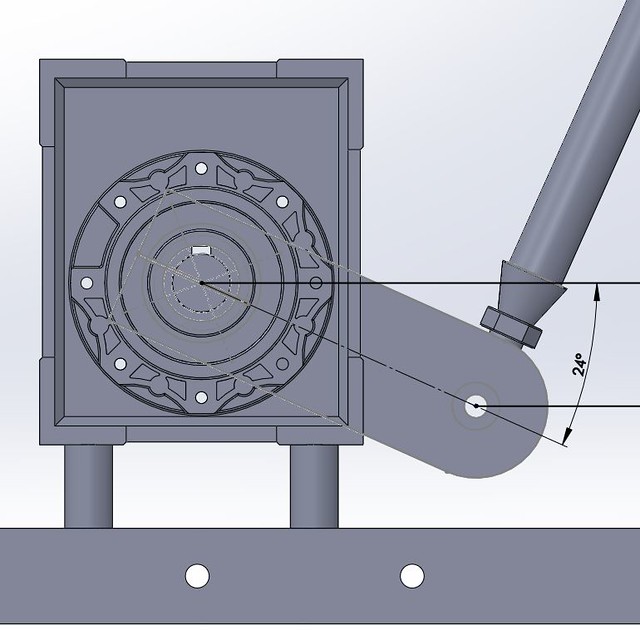 But from your image it looks like I should have the lever start off on a horizontal plane. Thanks for your help GA Dawg |
|
|
|
Post by hexpod on Jun 5, 2016 17:40:39 GMT
@ Hexpod But from your image it looks like I should have the lever start off on a horizontal plane. Thanks for your help GA Dawg I did a more precise drawing for you 
Try this .ini content and keep me posted Set the AMC "feedback limiter" at 30
Respect safety precautions
Thanks
[6DOF_design]
Base_Ratio=1.000000
Platform_Ratio=1.000000
Platform_Height=58.000000
Servo_Arm_length=16.000000
[6DOF_limiters]
Max_displacement=80.000000
Crossing_Sensitivity=6.000000
Knee_Cap_limit=70
Servo_Rotate_Limit=-126
[6DOF_input_limits]
Yaw_Limit=30
Pitch_Limit=25
Roll_Limit=25
Surge_Limit=25
Sway_Limit=25
Heave_Limit=20
[6DOF_Center_of_Gravity]
X=0.000000
Y=-8.000000
Z=20.000000 [Settings]
SW_Simulation=0
Invert_Servo_Values=0
[6DOF_heaveOffset_surgeOffset]
Heave=-11.000000
Surge=0.000000
[Servo_Orientation]
Servo5=-2.094395
Servo6=1.047198
Servo1=0.000000
Servo2=3.140000
Servo3=2.094395
Servo4=5.235988
[Coordinates]
Base_1y=-45.100000
Base_1x=-41.200000
Base_1Z=-150.000000
Base_2y=45.100000
Base_2x=-41.200000
Base_2Z=-150.000000
Base_3y=58.100000
Base_3x=-18.200000
Base_3Z=-150.000000
Base_4y=13.200000
Base_4x=59.500000
Base_4Z=-150.000000
Base_5y=-13.300000
Base_5x=59.500000
Base_5Z=-150.000000
Base_6y=-58.100000
Base_6x=-18.200000
Base_6Z=-150.000000
Platform_1y=-5.000000
Platform_1x=-41.200000
Platform_1Z=0.000000
Platform_2y=5.000000
Platform_2x=-41.200000
Platform_2Z=0.000000
Platform_3y=38.200000
Platform_3x=16.200000
Platform_3Z=0.000000
Platform_4y=33.200000
Platform_4x=25.000000
Platform_4Z=0.000000
Platform_5y=-33.200000
Platform_5x=25.000000
Platform_5Z=0.000000
Platform_6y=-38.200000
Platform_6x=16.200000
Platform_6Z=0.000000
[Servo_Calibration]
Servo_positive_range_16383-32737=20586.000000
Servo_negative_range_25-16383=5014.000000
[UseUpperServoLimit]
UseUpperServoLimit=0
|
|
|
|
Post by GA-Dawg on Jun 5, 2016 19:27:14 GMT
Thanks.....I will try the ini as soon as I get the new chip in (Tuesday/Wednesday)
Cheers
GA Dawg
|
|
|
|
Post by Trip Rodriguez on Jun 6, 2016 5:08:07 GMT
Thanks @ga-DAWG ! Perfect and very close to my estimate. Do you think a rectangle upper platform (similar in dimensions to the one Stevant has) would ever move a corner outside the 6'4" circle due to moving? It looks like maybe it does.
No worries if you don't know (and I know the dimension of the upper seat platform might change the answer), The dimension you gave is enough to give me an excellent idea of how much space the sim should take up.
|
|
|
|
Post by GA-Dawg on Jun 7, 2016 0:37:35 GMT
I should have my top mount completed this weekend and will let you know. It will definitely extend past the radius in the "front".
|
|
|
|
Post by GA-Dawg on Jun 9, 2016 15:43:39 GMT
Quick update ... 1. Shorted chip replaced ( tronicgr...really appreciate that the chips are socketed) so I am backup and run...kind of 2. Found out that I order the wrong sensor for positioning. I bought 360 degree ones and everything is really setup for 180. New sensor on the way (I also updated the build link) 3. Updated post number one. Post or PM me if something doesn't make sense 4. Constructing the seating area. I will not be covering this in the build as there are many different ways to do this some of which comes down to personal preference. One thing to keep in mind is center of gravity (COG) which is general refereed to as the mid of your stomach. Try and keep this in the center of the platform. That way you will not have to adjust in the motion software (of course you will have to adjust heave no matter what). Cheers, GA Dawg |
|
|
|
Post by hexpod on Jun 10, 2016 16:38:54 GMT
Quick update ... 2. Found out that I order the wrong sensor for positioning. I bought 360 degree ones and everything is really setup for 180. New sensor on the way (I also updated the build link) Cheers, GA Dawg It seems that I made a mistake. the 3.1 .dll was broken.
Do you still have your 360 mounted?
|
|
|
|
Post by GA-Dawg on Jun 10, 2016 20:28:31 GMT
Yes...I can test a new version if you have it ready.
|
|
|
|
Post by hexpod on Jun 10, 2016 22:47:29 GMT
|
|
|
|
Post by GA-Dawg on Jun 21, 2016 13:47:17 GMT
Well I am back. Been busy testing (playing). Will try and post a video soon. Things I still need to do. 1. Finish tuning the hitachis. I got the Accl Ramp down to .1 but I would like to get it lower 2. Finish top gear box brace
3. Remount XLR box
4. Reprint (3D Print) Position Holders. I am going to add a wire guide and end cap to make things look cleaner
5. Make temporary mount for monitor and speakers. My oculus rift is on order but has not arrived yet
6. Mount rubber surface to top of the platform.
7. Swap out steer wheel (I am currently using a G27 setup)
8. Install butt kicker(s). Right now I just have one.
9. Design covers for motors and gearboxes
10. Repaint
11. Finish build log
12. Move it to its actually location. Right now it just in my shop
BFF is working great now that I am using 180 position sensors (no more paint scraping  ). ).

ignore the crap in the background
Cheers,
GA Dawg
|
|
|
|
Post by jthiani on Jun 21, 2016 13:55:31 GMT
looks great ..... cant wait for the video !!!
|
|
|
|
Post by GA-Dawg on Jun 26, 2016 21:45:30 GMT
Hi All,
Well Tuning is the hardest part of this project. Here are a few video's of the system in action. I am using BFF and a few codemaster games. Still need to find the best Accl/Decl ramp on the inverter (lowest value with out errors) and ramp within the different motion application. I have a cheap TV hooked up right now as I am waiting on my Oculus. Oh and ignore the crap in the back ground. I am build in system at my shop.
Dirt 3
Grip Autosport
Cheers,
GA Dawg
|
|
|
|
Post by carbon on Jul 1, 2016 5:25:02 GMT
Looking great, certainly giving you a hell of a ride :-).
|
|







 ).
). 