|
|
Post by paulg100 on Oct 4, 2016 9:18:46 GMT
"What is the procedure for the physical adjustment of the position sensors?"
what i did was just set sensores on amc to eg: 135 positive, 246 negative
Attach sensors to shaft then check each one, if it spins then oscilates then A/B output is around wrong way on 6dof board.
Just reverse the wires so that shaft rotates and stops at home.
repeat for each motor
once all are correct, manually turn pot whilst connected to shaft until home is lever at 90 degrees to floor, then secure pot.
thats how i did mine.
out of interest what cable are you using for pots?
and how are you connecting cable to pot? solder,terminal blocks? i found the screw type terminal blocks to be unreliable.
Id recommend soldering them. just make sure the iron is hot so that all you need is a quick touch to pin on pot, otherwise the heat may damage the pot.
for connections from AMC to VFD, post a pic/diagram and ill confirm if it is correct
|
|
|
|
Post by Trip Rodriguez on Oct 6, 2016 3:02:35 GMT
Thanks paulg100 ! I thought my home position was not 90 degrees from floor, but 60 degrees from floor for mid stroke? I do plan to solder the sensors, and I'm a bit scared of screwing them up since I don't have much soldering experience. Fortunately I at least have a thermostat controlled iron. The cable I'm using is Honeywell 18-6 with foil shielding inside the plastic covering. I got this wire for free =). It's meant mainly for security systems etc. My VFD's and Thanos boards are now mounted in the box, braking resistors are not yet mounted but I'm going to wire everything else up before I put them in to give me more room to work. Wiring next. I planned to start tonight but I just got home and I'm exhausted so I think I'm going to let it rest until tomorrow. I have to pack for my 3 day trip to California for Star Citizen "CitizenCon" this weekend, and also need to get a center stick mount built (perhaps a temporary one) for use next week on the livestream so it's going to be a busy few days. Here is an updated picture, with the framing removed from the gearboxes/motors still:   |
|
|
|
Post by paulg100 on Oct 6, 2016 5:48:53 GMT
"I thought my home position was not 90 degrees from floor, but 60 degrees from floor for mid stroke?"
possibly, I'm still being plagued by issues at the minute (6 dof board is now not working properly so is out of cab for bench testing).
I havnt had the chance to check which works best, but have used 90 so far.
Cockpit looks ace, lovely clean build.
does starcitizen even support motion output?
|
|
|
|
Post by Trip Rodriguez on Oct 6, 2016 21:22:15 GMT
Cockpit looks ace, lovely clean build. does starcitizen even support motion output? Thanks! As for Star Citizen, not yet (currently no VR support either) but it was promised in the 4.5M stretch goal: Extended hardcore flight sim controller support: Flight Chairs, multiple monitors, Track-IR, MFD (Multi Function Displays) and more on launch. My assessment was that the only "Flight Chair" that would actually need "support" from the devs would be motion sims, this was confirmed to me by James Pugh through customer service 2 years ago. |
|
|
|
Post by Trip Rodriguez on Oct 7, 2016 8:23:09 GMT
I see lots of mentions of the "manual" for the Thanos boards but I can never find it!! Anyone got a link?
I'm ready to start wiring up the Thanos boards but need instructions. I don't find it on the blog either.
Also, what is the standard numbering for the actuators for reference?
|
|
|
|
Post by Trip Rodriguez on Oct 7, 2016 8:38:59 GMT
Ok found the dropbox via a google search for Thanos AMC 1280 manual, looks like I have what I need to get started. Here is the link, in case someone finds this post via google search www.dropbox.com/sh/641qkq11p3prar1/HzVrdDiu3q |
|
|
|
Post by tronicgr on Oct 7, 2016 13:40:13 GMT
I see lots of mentions of the "manual" for the Thanos boards but I can never find it!! Anyone got a link? I'm ready to start wiring up the Thanos boards but need instructions. I don't find it on the blog either. Also, what is the standard numbering for the actuators for reference? You can see the axis assignment in the next photo 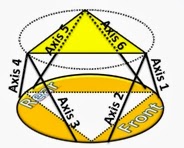 Thanks Thanos |
|
|
|
Post by Trip Rodriguez on Oct 21, 2016 12:06:32 GMT
Thanks Thanos, that is a huge help!
Sorry about the lack of updates but it's been very slow going due to other things consuming my time as well. Tonight I got the breaker sub panel installed. It would be finished except it turns out the box I bought didn't include a ground bus bar for some dumb reason so I have to pick one up.
Also I have to pull a breaker out of the main panel to put in the breaker for the sub panel because the main panel is full. I haven't yet picked up the replacement for that breaker (need a different brand) that will go in the new panel so the bedroom heat upstairs still works.
The new panel includes the following circuits:
6x 240V 15 Amp, each with a 14-3 wire, for a dedicated line running to each of the VFD's
1x 120V 20 Amp feeding a server room power strip for the gaming PC and all related items and accessories
1x 240V 30 Amp for the electric heater we bought to heat the "sim room" I built in the basement to house the motion sim
1x 240V 15 Amp to replace the breaker I'm taking out of the main panel to make room for the 100 Amp breaker to feed the sub panel (feeds bedroom heat upstairs)
|
|
|
|
Post by Trip Rodriguez on Oct 21, 2016 12:11:07 GMT
I've got the VFD's wired to the motors and sensor wires hooked up at the AMC1280USB end. Also have started hooking wires to the 6DOF extension board, that is the current step. Now that I've got the wires from the breaker panel I can also wire those to the VFD's etc. It just occurred to me I need to run a 120V line to feed the 24V power supply, I'll probably just run a cord down to the server center power strip. It's very similar to this one:  |
|
|
|
Post by Trip Rodriguez on Oct 22, 2016 0:44:13 GMT
The breaker sub panel is complete and closed up with lines running to the motion electronics enclosure and ready to be turned on with the flip of the breakers =). Now it's back to wiring, I'm really dreading soldering the magnetic sensors, fearful I might goof and damage them.
My soldering iron is a radio shack model with an adjustable thermostat and I have some of the thin solder so I should be fine. Most of my trepidation is due to the many years I spent doing the (rare) occasional soldering project with an ancient non-adjustable soldering iron that got FAR too hot (in retrospect there was clearly something wrong with it).
Things should be moving quickly now, even given the ridiculously long list of other things I need to do. For every three or four hours I spend being responsible I'll work an hour on the motion sim. =)
|
|
|
|
Post by Trip Rodriguez on Oct 23, 2016 7:48:53 GMT
Now that I'm getting close to finished with the build I'm reviewing the build threads from Stevant and GA-Dawg to try to educate myself and avoid issues. I have a few questions:
Wiring: I'm doing ALL the wiring right up front, will I need to disconnect anything for initial power up and tuning? Can I just not connect the AMC1280 USB cable and having the VFD's, AMC1280, and 6DOF board all wired right from the start is ok?
Initial startup/tuning: I'm leaving the upper gearbox brace structure off for now so my arms can rotate 360 degrees without interference during this stage. Do I still need to remove the upper platform for this step as in GA-Dawg's guide or can I do all of this initial setup with everything fully assembled so long as the arms can rotate all the way around?
Platform weight: I'm trying to get maximum performance for VR (I'm told speed is much more important in the case of VR) so I've been trying to keep the platform as light as possible. I have no monitor mounted for this reason and am even planning to make the upper hex frame out of aluminum instead of steel. Stevant talks about more weight making things smoother, is there any chance my platform (with my ~180 pound body on it) could be light enough to be disadvantageous? Adding weight is easy, but there is no point in my going to the significant effort and expense of making the upper frame aluminum if I'm going to have to add weight anyway!
Measuring my dimensions: I used the 130mm setting on my torque arms (again in the interest of gaining more speed for VR simulation), and to compensate for that I mounted my gearboxes a bit closer together. I did adjust my tie rods roughly to give me an equilateral triangle at the "home" position. How can I best obtain all the needed accurate dimensions of my own unique build to input into the software?
Adjusting the position sensors: How should I measure the angle of my torque arms when trying to set the home position adjusting the position sensors? GA-Dawg talks about an angle specific to the hundredth of a degree! I don't know how I'm going to get that kind of precision measurement. Also, GA-Dawg's home position is 41.47 degrees off horizontal, where did that number come from and will it be the same for me as it was for him given my different dimensions?
I think that's it for now, I can't wait to get this thing moving!
Thanks again to Thanos and all those who have gone before me, making it possible for me to bring this dream to reality!
Trip
|
|
|
|
Post by paulg100 on Oct 23, 2016 9:10:18 GMT
My two cents,
"Can I just not connect the AMC1280 USB cable and having the VFD's, AMC1280, and 6DOF board all wired right from the start is ok?"
If you are sure everything is wired correctly then yes, its a lot of wires good luck!! I would make sure AMC/pot connections are all correct first then move on to 6dof connections if it were me. If your first run
is with platform unmounted and arms can rotate 360 then theres not really anything you can damage.
Did you get a supply of spare chips for the 6dof board? you will probably need them.
Printing the cover that thanos put on thingiverse would also be a good idea.
the speed is the ratio of your motors/gearbox no matter the weight (within reason). Torque to weight is the main limiting factor so things get moving as quick as possible.
If the weight is too little you may get backlash in the gearbox's. On my sim if I run it without me in I get some backlash on down movements, but once I'm in it its fine. If your 180 pounds I don't think the weight difference in ali will cause an issue with that, it might reduce torque requirement though which is good.
"How can I best obtain all the needed accurate dimensions of my own unique build to input into the software?"
just use a tape measure I guess or a steel meter rule might be more accurate. Once you make plans in CAD you will see where things are off so can double check against actual sim and adjust where necessary.
|
|
|
|
Post by Trip Rodriguez on Oct 23, 2016 20:14:52 GMT
Ok, I haven't connected up the 6DOF board yet so I can test before I do that.
When I was talking about speed I actually meant ACL rather than maximum speed. Others with similar builds to mine have limited the actual speed to much less than 100%.
I have no idea how to use CAD but I guess I can try =). I'll have to see if I have a contact that can help me.
There's still plenty more answers to my questions needed folks so please read them and see if you can help me out =) I'm going to repost the questions that remain so people only have to look at the most recent post, I hope that is acceptable.
Thanks again!
|
|
|
|
Post by Trip Rodriguez on Oct 23, 2016 22:43:14 GMT
I installed freeCAD to see if I could manage to make a simple drawing but it looks like it would take quite a bit of time to learn even extreme basics. I've used inkscape and I'm now thinking that I could make 2D drawings with that and get dimensions that way, kind of an odd misuse of an illustration program but I think it will work. =).
|
|
|
|
Post by Trip Rodriguez on Oct 23, 2016 23:32:04 GMT
Questions:
Limit switches: I don't recall limit switches on Stevant or GA-Dawg build and didn't make any provisions or plans for them. If a sensor died and the motor kept going the only thing that would happen (in theory) is the crank arm would hit the top bracing between gearboxes which is 1.25" of MDF. As long as there isn't any chance of damage to the gearbox or electronics I'm not too worried about it. What do you think guys?
|
|





